
본문
Kyungseo Park


저희 인터랙티브 로봇 연구실은 사람 및 주변 환경과 안전하고 자율적으로 상호작용할 수 있는 로봇을 연구하고 있습니다. 로봇에게 다양한 감각 (촉각+시청각)능력을 부여하는 연구와, 다중감각을 활용한 외부 환경 인식 및 활용 연구를 하고 있습니다. 이를 통해 인간의 일상생활 공간(집, 학교, 병원 등)과 같은 비구조화된 환경에서도 안전하고 능숙하게 활동이 가능한 로봇을 구현하고, 인간의 일상생활 경험을 혁신하는 것을 최종 목표로 하고 있습니다.
Our Interactive Robotics Lab focuses on developing robots that can interact autonomously and safely with humans and their surroundings. We are researching how to provide robots with various sensory abilities (tactile, visual, and auditory) and how they leverage multi-modal senses to perceive and interact with their environment. Our ultimate goal is to develop robots that can operate safely and skillfully in unstructured environments, such as homes, schools, and hospitals, and ultimately revolutionize human experiences in everyday life.
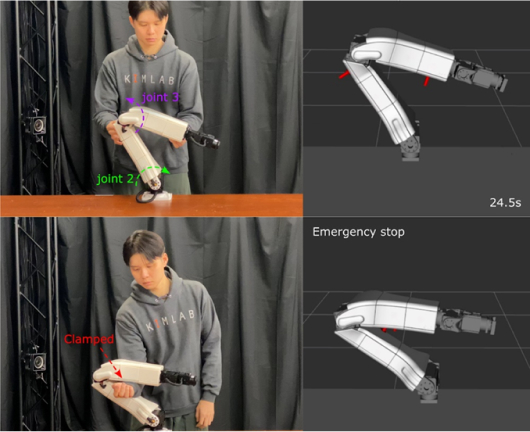
- Park et al., Low-cost and Easy-to-Build Soft Robotic Skin for Safe and Contact-rich Human-Robot Collaboration, IEEE Transactions on Robotics, vol. 40, pp. 2324-2338, 2024
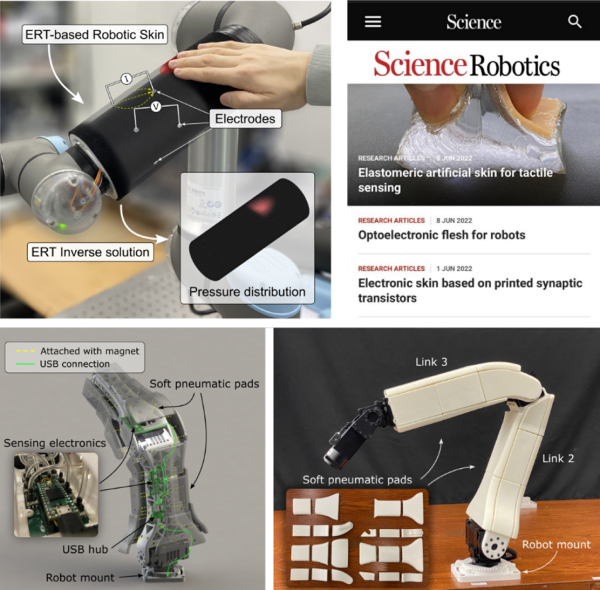
- Park et al., Neural-Gas Network-Based Optimal Design Method for ERT-based Whole-body Robotic Skin, IEEE Transactions on Robotics, vol. 38, no. 6, pp. 3463-3478, 2022
- Park et el., A biomimetic elastomeric robot skin using electrical impedance and acoustic tomography for tactile sensing, Science Robotics, vol. 7, no. 67, 2022
- Park et al., Deep-Neural-Network-based Tomographic Sensing Methodology for Large-Area, High-Resolution Robotic Tactile Sensing, IEEE Transactions on Robotics, vol. 37, no. 5, pp. 1570-1583, 2021
- Park et al., Adaptive Optimal Measurement Algorithm for ERT-based Large-area Tactile Sensors, ASME/IEEE Transactions on Mechatronics, vol. 27, no. 1, pp304-314, 2021
- 2023 ~ Present
조교수, 로봇및기계전자공학과, DGIST
Assistant Professor, Department of Robotics and Mechatronics Engineering, DGIST - 2022 ~ 2023
박사후연구원, 일리노이대학 어바나-샴페인
Postdoctoral Researcher, University of Illinois Urbana-Champaign - 2018
방문연구원, 막스-플랑크 연구소
Visiting scientist, Max-Planck Institute for Intelligent System (MPI-IS) - 2018 ~ 2022
공학박사, 기계공학과, KAIST
Ph.D. in Dept. of Mechanical Engineering, KAIST - 2016 ~ 2018
공학석사, 기계공학과, KAIST
M.S. in Dept. of Mechanical Engineering, KAIST - 2012 ~ 2016
공학사, 기계공학과, KAIST
B.S. in Dept. of Mechanical Engineering, KAIST
- 인간친화형 로봇 / Human-friendly Robot
- 인공지능 기반 로봇 피부 / AI-based Robotic Skin
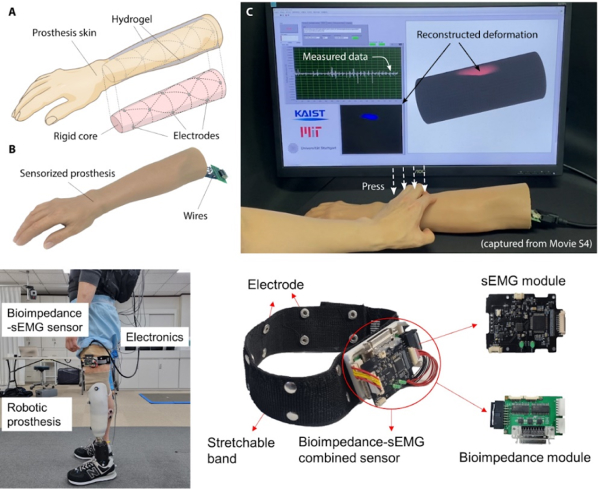
- 인간-기계 인터페이스 / Human-machine Interface