본문
김기섭조교수
Giseop KimAssistant Professor
Giseop Kim

21세기에는 로봇이 공장을 넘어 현실 공간 속으로 넘어오고 있습니다. 로봇은 필연적으로 공간 속에서 움직입니다. 사람들과 함께 상호작용하며 미션을 수행하기 위해서, 로봇은 주변 공간을 복원하고 의미론적으로 이해할 수 있어야 합니다. 이에 기여하기 위해, 로봇인식 및 자율화 연구실 (Autonomy and Perceptual Robotics Lab, APRL) 에서는 모바일 로봇의 자율 네비게이션을 위한 로봇 인식 기법 및 SLAM (Simultaneous localization and mapping) 알고리즘과 시스템을 개발합니다. 이를 위해 운동 역학 (kinetics)부터 컴퓨터비전 (딥러닝), 실시간 (real-time) 알고리즘 구현 등 기계공학부터 컴퓨터공학까지 다양한 분야의 이론을 배우고 적용합니다. 더 나아가, 많은 수의 다양한 로봇들이 공존하게 될 로봇 웹 시대에서 SLAM 기술이 어떻게 발전해야 하는지 선제적으로 정의하고 선도적으로 해결하는 그룹입니다.
In the 21st century, robots are entering beyond factories into real-world spaces. As robots inevitably navigate through environments, they must be capable of reconstructing and semantically understanding their surroundings to interact with people and accomplish missions. To contribute to this goal, the Autonomy and Perceptual Robotics Lab (APRL) develops robotic perception algorithms, and robust and resilient SLAM (Simultaneous Localization and Mapping) systems for autonomous navigation of mobile robots. This involves applying diverse theories spanning from kinetics to computer vision (deep learning) and real-time algorithm implementation, bridging fields such as mechanical engineering and computer science. Furthermore, APRL is a pioneering group that proactively defines and solves the challenges of advancing SLAM technology (we call it SLAM 2.0) for the era of the robot web, where numerous diverse robots will coexist.
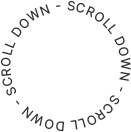
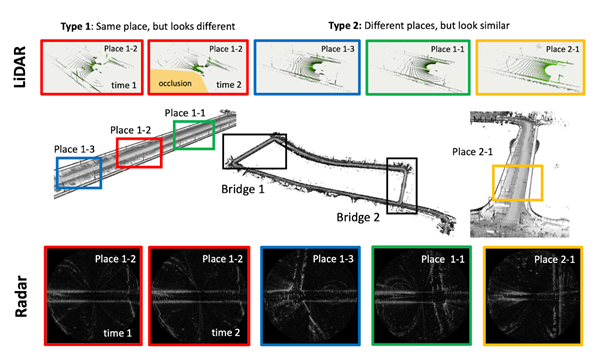
- Scan Context++: Structural Place Recognition Robust to Rotation and Lateral Variations in Urban Environments”, Giseop Kim, Sunwook Choi, Ayoung Kim, (2022) IEEE Transactions on Robotics 38 (3), 1856-1874
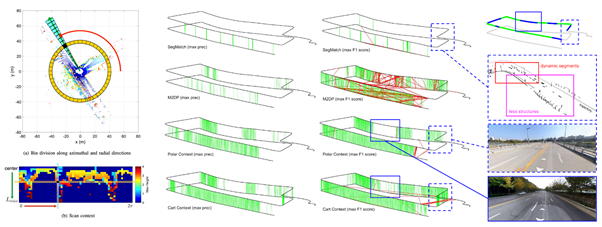
- “LT-mapper: A Modular Framework for LiDAR-based Lifelong Mapping”, Giseop Kim, Ayoung Kim, (2022) IEEE International Conference on Robotics and Automation (ICRA)
- “Mulran: Multimodal range dataset for urban place recognition”, Giseop Kim, Yeong Sang Park, Younghun Cho, Jinyong Jeong, Ayoung Kim, (2020) IEEE International Conference on Robotics and Automation (ICRA)
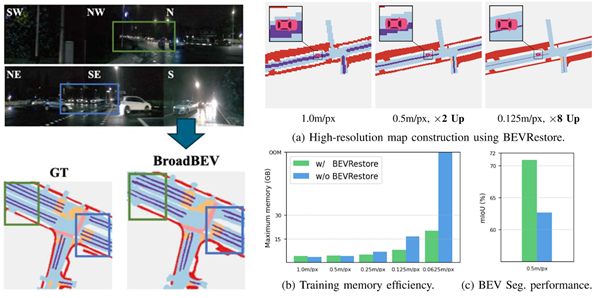
- “Addressing Diverging Training Costs Using BEVRestore for High-Resolution Bird's Eye View Map Construction”, Minsu Kim, Giseop Kim, Sunwook Choi, (2024) IEEE Robotics and Automation Letters 9 (11), 10700-10707
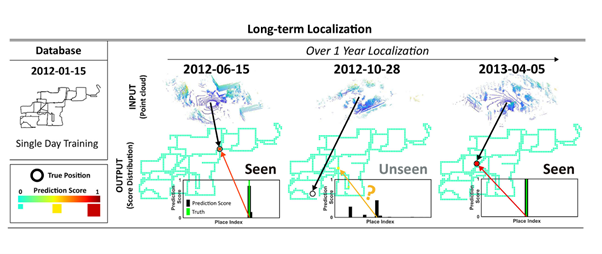
- “1-day learning, 1-year localization: Long-term LiDAR localization using scan context image”, Giseop Kim, Byungjae Park, Ayoung Kim, (2019) IEEE Robotics and Automation Letters 4 (2), 1948-1955
- 2024-현재
DGIST 로봇및기계전자공학과 조교수 (Assistant Professor, RME, DGIST) - 2021-2024
Research Scientiest at NAVER LABS - 2019-2022
KAIST 건설및환경공학과 공학박사 (PhD, Dept. of Civil and Environmental Engineering, KAIST) - 2017-2019
KAIST 건설및환경공학과 공학석사 (MS, Dept. of Civil and Environmental Engineering, KAIST) - 2012-2017
KAIST 건설및환경공학과 공학사 (BS, Dept. of Civil and Environmental Engineering, KAIST)
- SLAM (Simultaneous localization and mapping)
- 3D vision and sensor fusion for robot perception
- Digital twin for autonomous robot navigation and spatial analysis