본문
GyeungHo Choi



VILS(Vehicle In the Loop System) 연구실은 가상환경을 기반으로 자율주행에서 인지, 판단, 제어에 이르는 과정들을 검증하고 구현하는 연구를 하고 있습니다. 고속 및 악천후 상황과 같은 현실에서 검증하기 어려운 시나리오를 가상환경 시뮬레이션을 기반하여 자율주행 알고리즘을 연구하고 있습니다. 가상환경에서 검증된 알고리즘을 자율주행 실제 차량에서도 적용하고 주행하는 연구를 하고 있습니다.
- “Enhancing lane detection with a lightweight collaborative late fusion model”, Lennart Lorenz Freimuth Jahn, Seongjeong Park, Yongseob Lim, Gyeungho Choi, Robotics and Autonomous Systems, 2024, DOI:10.1016
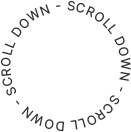
- “Effects of Sim2Real Image Translation via DCLGAN on Lane Keeping Assist System in CARLA Simulator”, Jinu Park, JungSeok Shim, Minhyeok Baek, Yongseob Lim, Gyeungho Choi, IEEE Access, 2023, DOI:10.1109
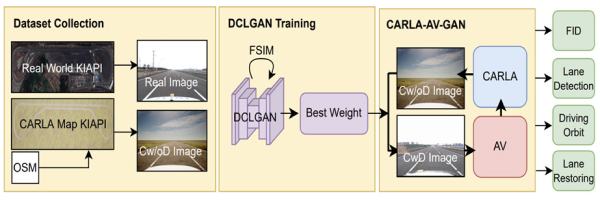
- “CARLA Simulator-based Evaluation Framework Development of Lane Detection Accuracy Performance under Sensor Blockage caused by Heavy Rain for Autonomous Vehicle”, Hyeonjae Jeon, YaeOhn Kim, Minyoung Choi, Donggeon Park, Sungho Son, Jungki Lee, Gyeungho Choi, Yongseob Lim, IEEE Robotics and Automation Letters (RA-L), 2022, DOI: 10.1109
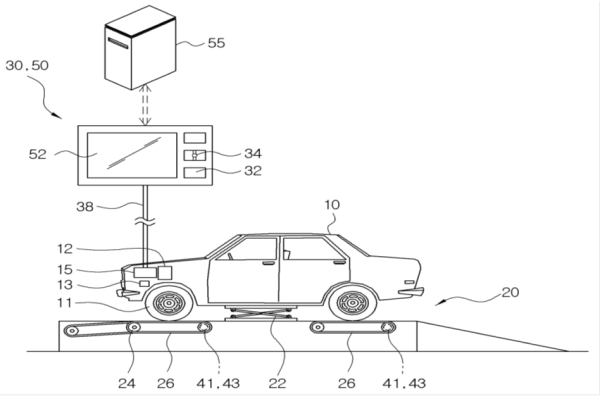
- “System for inspecting automobile based on virtual reality”, Sunghoon Na, Yongseob Lim, Gyeungho Choi, Patent 1023800500000, March 2022, Korea.
- “Hybrid Tracker Based Optimal Path Tracking System of Autonomous Driving for Complex Road Environments”, Eunbin Seo, Seunggi Lee, Gwanjun Shin, Hoyeong Yeo, Yongseob Lim, Gyeungho Choi, IEEE Access Vol. 9. 2021, DOI: 10.1109
- 2012 ~ Present
대구경북과학기술원 융합전공 교수 - 2020 ~ Present
자율주행자동차 사고조사위원회 위원장 - 2019 ~ 2022
자동차안전하자 심의위원회 위원 - 2019 ~ 2021
태국왕립대학교(MUTNB) 석좌교수, 태국 - 2019 ~ 2021
U. of Louisville 겸임교수, 미국 - 2000 ~ 2010
EROOM G&G CEO & 이사회 의장 - 1993 ~ 2008
계명대학교 기계자동차공학부 교수
- 고속 및 악천후 상황에서 통합 알고리즘 개발
- 가상환경에서의 자율자동차 검사시스템
- VILS 기반 차량 추돌 회피 및 안정성 알고리즘 검증