본문
황민호조교수
Minho HwangAssistant Professor
Minho Hwang

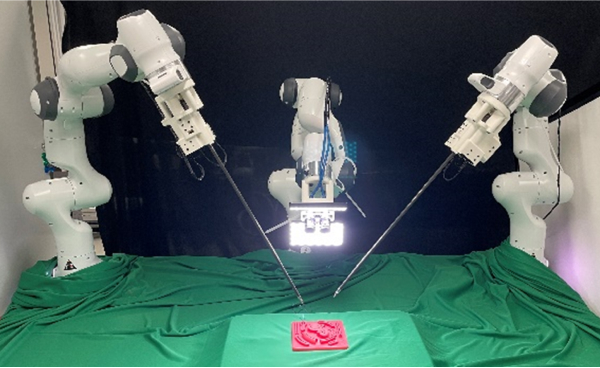
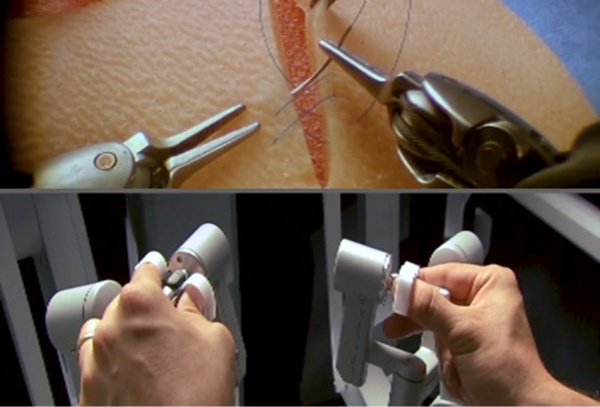
수술로봇 및 정밀조작 연구실(SurGLab)은 다음의 두 가지 비전을 가지고 연구에 임하고 있습니다.
1) 수술의 패러다임을 변화시키는 차세대 수술로봇기술과,
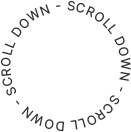
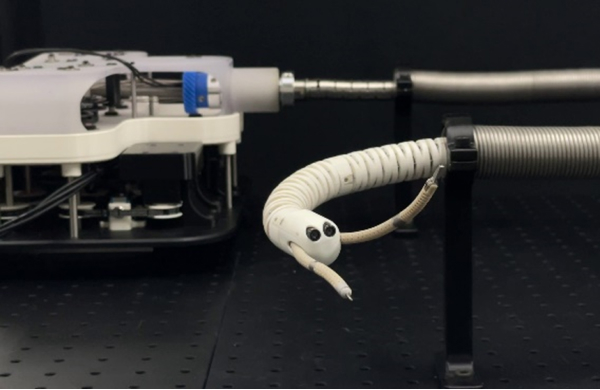
2) 사람의 수준으로 물체를 정밀하게 조작하는 로봇기술을 개발하여 인류 사회에 기여하자. 조금 더 상세하게는, 입, 항문 등으로 진입하여 흉터없이 수술이 가능한 유연한 수술로봇기술과 매듭 묶기, 봉합, 정밀기구 조립, 물체 정밀파지와 같은 현재 사람은 쉽게 할 수 있지만 로봇은 하기 어려운 조작 작업들을 자동화하기 위한 기반기술을 개발하고 있습니다. 우리는 이러한 목표를 달성하기 위해 로봇 메커니즘 설계, 시각적 물체인식 및 로봇제어, 물체조작을 위한 딥러닝/강화학습 등의 다양한 학문 분야를 공부/연구하고 있습니다.
- “Hysteresis Compensation of Flexible Continuum Manipulator using RGBD Sensing and Temporal Convolutional Network,” J. Park, S. Jang, H. Park, S. Bae, and M. Hwang, IEEE Rob. and Auto. Letters (RA-L), Vol. 9, No. 7, pp. 6091-6098, May, 2024
- “Automating Surgical Peg Transfer: Calibration with Deep Learning Can Exceed Speed, Accuracy, and Consistency of Humans,” M. Hwang, J. Ichnowski, B. Thananjeyan, D. Seita, S. Paradis, D. Fer, T. Low, and K. Goldberg, IEEE Trans. on Auto. Sci. and Eng. (T-ASE) (presented at IROS)), Vol. 20, No. 2, pp. 909-922, April 2023
- “Efficiently Calibrating Cable-Driven Surgical Robots With RGBD Sensing, Temporal Windowing, and Linear and Recurrent Neural Network Compensation,” M. Hwang, B. Thananjeyan, S. Paradis, D. Seita, J. Ichnowski, D. Fer, T. Low, and K. Goldberg, IEEE Rob. and Auto. Letters, Vol. 5, No. 4, pp. 5937-5944, Oct. 2020
- “K-FLEX: A flexible robotic platform for scar-free endoscopic surgery,” M. Hwang and D. S. Kwon, The Int. J. of Med. Rob. and Comp. Assisted Surg., Vol. 16, No. 2, April 2020
- “Strong Continuum Manipulator for Flexible Endoscopic Surgery,” M. Hwang and D. S. Kwon, IEEE/ASME Trans. on Mech., Vol. 24, No. 5, pp. 2193-2203, Oct. 2019
- 2021 ~ Present
DGIST 로봇및기계전자공학과 조교수 - 2019 ~ 2021
University of California Berkeley, Postdoctoral Researcher - 2018 ~ 2019
KAIST, 연수연구원 - 2017 ~ 2018
㈜유진기술, 수석연구원 - 2012 ~ 2017 : KAIST 공학박사
- 2010 ~ 2012 : KAIST 공학석사
- 2005 ~ 2010 : KAIST 공학사
Eeducation
- Robot/AI-assisted Surgery
- Mechanism Design/Kinematics Analysis of Robot Manipulator
- Tele-robotics and Control
- Visual Servoing Control
- Deep Learning/Reinforcement Learning for Robots
- Robot Grasping and Manipulation